京津冀地区免费上门服务
京津冀地区免费上门服务

(二)适用范围
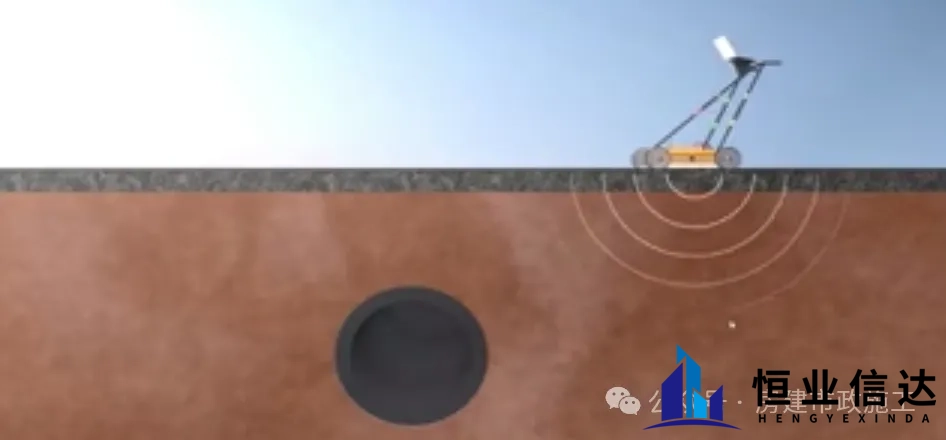
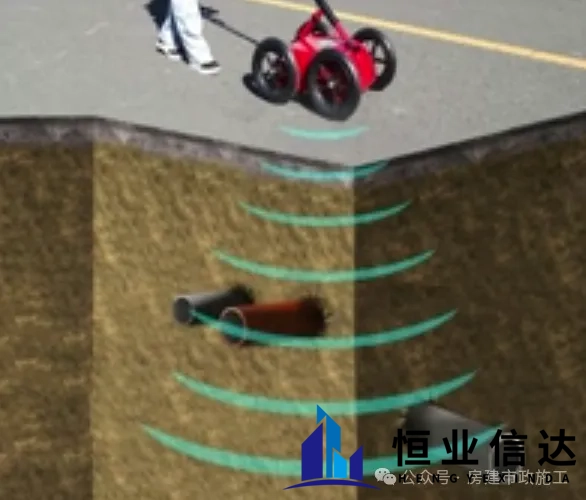
适用于城市市政各类埋地管道的位置、走向、埋深探测,涵盖给水、排水、燃气、电力通信套管等非金属及金属管道。可适配沥青路面、水泥路面、土路、绿化带等各类地表工况,尤其适合老旧城区无图纸、管线密集交叉、地下情况复杂的区域管线普查。不受地面通行、浅层杂物轻微干扰,可实现大面积、长距离管道快速摸底排查,不适用于岩层密度极高、地下金属构件密集的强干扰区域。
(三)检测精度
常规探测深度0.5–8m,管道平面位置定位精度±10cm,埋深检测精度±15cm;浅层(0.5–3m)管道精准探测精度可提升至平面±5cm、埋深±8cm。管线走向轨迹偏差≤0.5°,可清晰区分间距≥20cm的并行管线,能够精准识别管道弯折、分叉、偏移等走向异常情况,满足市政管网普查、施工前管线摸排、管线档案更新的精度要求。
(四)检测方法和步骤
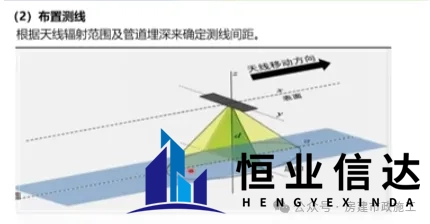
1. 前期准备:清理检测作业面地表杂物、碎石、积水,平整检测路面;根据施工图纸及现场摸排情况,划定检测区域,规划网格状探测路线;开机调试设备,完成天线频率校准、GPS定位校准、深度参数初始化,测试设备信号稳定性。
2. 现场探测作业:操作人员手持雷达设备,沿规划路线匀速平稳推进,推进速度控制在0.8–1.2m/s,全程保持天线与地面平行、无悬空无倾斜;对管线密集、疑似分叉、弯折区域,采用加密网格复测,重点捕捉管线轮廓信号。
3. 数据采集存储:探测过程中实时采集地下介质反射信号,设备自动生成实时剖面图像,同步绑定GPS点位坐标;对异常管线位置、走向突变点做好标记,单独留存高清数据图像,完整记录探测轨迹数据。
4. 后期数据处理:将采集数据导入专业处理软件,过滤地面杂物、地下钢筋等干扰信号;拟合管道完整走向轨迹,精准测算管道埋深、管径、偏移位置,生成管线平面分布图、走向轨迹图及检测数据报告。
(五)检测要点
1. 作业时设备移动速度必须均匀,严禁忽快忽慢、停顿偏移,避免造成图像模糊、信号缺失,导致管线定位偏差。
2. 避开大型金属构件、高压线缆、密集钢筋区域作业,若无法规避,需通过多次复测、参数微调过滤干扰信号,保证数据有效性。
3. 深浅层管道探测需匹配对应天线,浅层管道选用高频天线提升精度,深层深埋管道切换低频天线保障探测深度。
4. 检测数据需与现场地标、道路轴线精准对应,确保最终管线走向图纸可直接用于市政施工、管网改造作业。
二、电子听漏仪检测给水管道漏水点工艺
(一)检测设备配备
采用高精度智能电子听漏仪整套设备,主要包含地面听音主机、高灵敏度拾音传感器、管道接触式探头、无线降噪耳机、数据分析仪、续航锂电池、校准工具及配套收纳设备。设备搭载智能滤波系统,可自动过滤环境噪音,精准捕捉管道漏水产生的20–2000Hz专属声波信号,部分高端机型配备漏水信号图谱实时显示、漏点智能预判功能,可同步记录检测声波数据。




(二)适用范围
专门用于市政给水管道(铸铁管、钢管、PE管、水泥管等)暗漏、微漏、明漏点位检测定位,适配市政主干道、小区管网、城郊给水主管等各类埋地给水管道。可检测常规压力供水管道,适用于不开挖、不破坏路面的无损检漏作业,尤其适合夜间低噪音环境下的精准检漏,不适用于管道完全停水、无水压及管网压力过低的工况。
(三)检测精度
常规工况下漏点定位精度±0.5m,精准模式下定位精度可达±0.2m;可识别微小渗漏、常规渗漏、大面积渗漏等不同等级漏水信号,可区分漏水声波与水流冲击、管道振动、环境噪音等干扰信号,漏点识别准确率≥95%,能够精准定位浅层、中层埋地给水管道隐蔽漏点。
(四)检测方法和步骤
1. 前期准备:确认给水管道正常稳压运行,记录管网运行压力;排查检测区域环境,避开施工噪音、车流噪音、水泵运行噪音干扰,优先选择夜间、清晨安静时段作业;开机调试设备,完成传感器灵敏度校准、降噪参数设置、声波频率阈值调试。
2. 初步普查定位:采用地面听音模式,将拾音传感器平稳放置在管道走向对应的地面点位,每隔1–2m布设一个检测点,逐点采集地下声波信号;通过主机显示的声波强度、波形变化,初步锁定漏水异常区域。
3. 精准复测定位:对初步锁定的异常区域,缩小检测间距至0.3–0.5m,反复多点听音对比;切换管道接触式探头,在阀门、消火栓、管道裸露点位辅助检测,结合声波强弱变化、波形特征,精准判定漏点中心位置。
4. 数据记录复核:标记精准漏点位置,记录检测声波图谱、检测环境、管网压力等数据;对疑似漏点进行多次交叉复测,排除干扰误判,确认无误后整理检测数据,出具漏点检测报告。
(五)检测要点
1. 检测必须保障管道处于稳压供水状态,管网压力不足会导致漏水声波微弱,极易出现漏检、误检情况。
2. 严格规避环境噪音干扰,作业时远离施工机械、通行车辆、排水水流等噪音源,噪音过大时段暂停作业。
3. 区分漏水声波与管道接口振动、水流湍流、地下空洞回声等伪信号,通过波形、频率、多点对比方式精准甄别真实漏点。
4. 老旧管网、复杂交叉管网需结合管线走向图纸检测,避免因管线偏移导致检测点位偏差,保障定位精准度。
三、QV潜望镜检测工作井状况工艺
(一)检测设备配备
核心设备为市政管道高清QV伸缩式潜望镜,配备可伸缩加长杆、360°旋转高清摄像头、红外补光灯、高清显示屏、无线传输模块、大容量锂电池、防水防护外壳、角度调节旋钮。摄像头支持高清实时成像、自动对焦、逆光补偿,可适应井下昏暗、潮湿环境;伸缩杆可自由调节长度,适配不同深度工作井;设备自带视频录制、抓拍、点位标记功能,全程可视化记录检测过程。



(二)适用范围
主要用于市政排水、给水、燃气等各类管道工作井、检查井、阀门井的内部状况检测,同时可检测管道井口及井内1–5m范围内的管段入口工况。适用于井内无积水、少量积水、无大量淤积堵塞的工作井检测作业,可排查井体结构缺陷、井口连接管道异常,不适用于井内高水位、淤积严重、有毒有害气体超标、空间过于狭窄的工作井。
(三)检测精度
视频成像分辨率1080P,可清晰识别≥2mm的细微裂缝、孔洞、破损缺陷;井体结构变形、墙面脱落、砂浆破损等病害识别准确率≥98%;可精准记录缺陷位置、尺寸、形态,角度调节精度±1°,伸缩定位精度±5cm,能够完整捕捉工作井全方位结构及附属设施状态。
(四)检测方法和步骤
1. 前期安全准备:作业前开启工作井井盖,通风换气15–30分钟,检测井内有毒有害气体浓度,确认气体达标、无安全隐患后方可作业;清理井口周边杂物,避免杂物坠落井内。
2. 设备调试组装:组装潜望镜伸缩杆,调试摄像头焦距、亮度、角度,开启红外补光、视频录制功能;测试无线传输、实时显示功能,确保设备成像清晰、运行正常。
3. 井下检测作业:将调试完成的潜望镜缓慢伸入工作井内部,从井口自上而下、从井壁到井底全方位扫描检测;通过伸缩杆调节检测深度,旋转摄像头覆盖井体360°无死角,重点排查井壁裂缝、破损、渗漏、脱落、变形,井底淤积、杂物,井口管道接口错位、堵塞等问题。
4. 数据留存整理:检测全程不间断录制视频,对发现的缺陷点位实时抓拍、标记位置、备注病害类型;单井检测完成后,缓慢收回设备,检查设备完好性,留存完整的视频、图像资料。
5. 后期整理归档:汇总各工作井检测影像资料,梳理病害类型、数量、位置,形成工作井状况检测台账及检测报告。
(五)检测要点
1. 严格落实井下安全作业规范,必须先通风、检测气体,严禁气体超标、密闭缺氧环境下作业,防范中毒、窒息安全事故。
2. 设备伸入井下时缓慢平稳操作,避免摄像头、伸缩杆碰撞井壁、井底,防止设备损坏及影像抖动模糊。
3. 检测需做到全方位无死角,重点排查井体阴阳角、管道接口、井底等易出现病害的隐蔽位置,杜绝漏检。
4. 井内光线昏暗时必须开启红外补光功能,调节合适亮度,避免曝光过度或光线不足影响缺陷识别。
四、CCTV机器人检测市政管道内部状况工艺
(一)检测设备配备
采用市政管道专用CCTV爬行机器人检测系统,整套设备包含履带式爬行机器人主机、高清云台摄像头、智能控制系统、有线传输线缆、便携式操控终端、电源设备、辅助照明系统、里程计数模块、缺陷智能识别软件。机器人具备防水、防滑、防倾倒功能,可自适应不同管径管道;摄像头可360°旋转、自动对焦、变焦,支持高清视频实时传输;里程模块可精准记录检测距离,软件可自动识别、标注、统计管道内部各类缺陷。
(二)适用范围
广泛适用于市政排水、雨水、污水、给水等圆形、矩形市政管道内部全方位检测,适配管径DN300–DN2000的各类管道。可检测管道内部结构性缺陷(裂缝、变形、错口、脱节、破损、坍塌)和功能性缺陷(淤积、结垢、树根侵入、障碍物、渗漏),适用于管道无水、少量积水工况,是市政管道内部病害精细化检测、管网健康评估、修复前摸底的核心工艺,不适用于管道满水、淤积堵塞严重无法通行、管径过小的管道。
(三)检测精度
里程定位精度±1cm,缺陷位置精准定位;可识别≥1mm的细微裂缝、孔洞、管壁磨损等缺陷;管道变形、错口、脱节等结构性病害尺寸测量精度±2mm;缺陷智能识别准确率≥96%,视频成像清晰稳定,可完整还原管道内部原貌,满足市政管道检测验收、病害定级、修复方案设计的精度标准。
(四)检测方法和步骤
1. 管道预处理:检测前疏通管道,清理管内淤积、杂物、障碍物,排除管内积水,保障机器人可平稳通行;清理工作井井口,平整作业通道。
2. 设备调试:组装CCTV机器人设备,连接操控终端、传输线缆,开机测试机器人行走、转向、摄像头旋转、照明、视频传输、里程计数功能;校准里程参数、图像参数,确保设备运行正常、数据精准。
3. 下井就位:将机器人平稳放置于管道入口中心位置,调整摄像头角度,对准管道内部中轴线,做好检测准备。
4. 管道巡航检测:通过操控终端控制机器人匀速向前行驶,行驶速度控制在0.1–0.3m/s,全程保持平稳匀速;实时观察传输影像,对管道内壁、接口、底部、顶部全方位监测,遇到疑似缺陷点位时暂停行驶,放大对焦拍摄高清影像,标记缺陷类型、位置、尺寸。
5. 返程复核:单段管道检测完成后,控制机器人低速返程,对重点缺陷点位二次复核,确认病害信息无误;全程录制检测视频,同步留存所有缺陷影像资料。
6. 数据处理归档:利用配套软件整理检测数据,统计缺陷类型、分布位置、病害程度,按照市政管道检测规范完成病害定级,生成标准化管道内部检测报告。
(五)检测要点
1. 机器人行驶速度严格可控,严禁高速行驶,避免影像模糊、里程计数偏差,确保缺陷无漏检、数据无误差。
2. 管道预处理必须到位,管内积水、淤积、杂物过多会导致机器人卡顿、倾倒,影响检测连续性和精准度。
3. 检测过程中保持线缆匀速收放,避免线缆拉扯、缠绕、卡顿,保障设备信号稳定传输。
4. 对管道弯头、变径、接口、分叉等特殊位置重点检测,反复核对影像,精准判定病害隐患。
5. 严格按照行业规范对缺陷分级分类,保障检测报告可直接用于管网运维、修复施工。
五、3D声纳仪检测市政管道内部状况工艺
(一)检测设备配备
核心设备为市政管道专用3D声纳检测系统,包含3D高频声纳探头、数据采集主机、实时成像终端、漂浮式作业平台、防水线缆、GPS定位模块、数据处理软件。设备采用1800kHz高频声呐扫描技术,可实现360°全方位旋转扫描,能够在有水工况下采集管道内部三维点云数据,自动生成管道断面轮廓、淤积厚度、内壁形态三维模型,具备数据实时存储、三维建模、量化分析功能。
(二)适用范围
专门适配市政满水、高水位、无法排空积水的排水、雨水、污水管道内部检测,尤其适用于大管径(≥DN800)、积水严重、淤泥淤积的管道工况。主要用于检测管道内部积泥、积砂厚度、管壁腐蚀、管道变形、断面缺损、水下障碍物等病害,可精准测算管道过流断面损失,弥补CCTV机器人无法水下作业的短板,是含水管道健康检测的核心工艺。
(三)检测精度
声纳扫描最小分辨率5mm,横向检测精度8mm,管道断面尺寸测量精度±10mm;淤积厚度检测精度±5mm,管道变形、内壁缺损量化精度高;3D建模还原度≥98%,可精准测算管道过流面积损耗、淤积体积,点位定位精准,数据重复性强,满足含水管道病害量化评估、清淤工程量核算的精度要求。
(四)检测方法和步骤
1. 作业准备:排查检测管道水位、水流速度,确认水流平稳、无剧烈湍流;清理井口及管道入口漂浮杂物,避免遮挡声纳探头;组装设备,调试声纳波束角度、扫描频率、采集参数,完成设备校准。
2. 设备布设:将3D声纳探头固定于漂浮平台,平稳放置在管道入口水面中心位置,连接防水传输线缆,确保探头完全入水、姿态平稳,无倾斜、无晃动。
3. 扫描采集作业:控制漂浮平台匀速向管道内部推进,推进速度≤0.3m/s,避免图像拖影失真;探头全程360°旋转扫描,实时采集管道内壁、水下淤积、断面形态的声纳数据,同步传输至终端生成实时剖面图像。
4. 重点区域复测:对淤积厚度异常、管道变形、断面缺损的点位,降低推进速度,加密扫描频次,多角度采集数据,保障病害数据完整精准。
5. 数据建模分析:作业完成后导出原始扫描数据,通过专业软件生成管道三维立体模型、断面对比图,量化测算淤积厚度、管道变形量、过流断面损失,统计病害分布情况,出具检测分析报告。
(五)检测要点
1. 作业时严格控制设备推进速度,速度过快易造成扫描图像拖影、数据缺失,影响建模精度。
2. 保障检测水流平稳,管道内水流湍急、波浪过大时暂停作业,避免探头晃动导致扫描数据偏差。
3. 合理设置声纳波束角,常规工况波束角≤0.8°,保障近距离检测精度,精准捕捉细微病害及淤积变化。
4. 检测全程保持探头姿态水平稳定,严禁倾斜、触碰管壁及淤积层,防止设备损坏和数据失真。
5. 结合管道管径、水位调整扫描参数,大管径高水位管道适当提升扫描频次,确保全方位覆盖无死角。
网 址:www.hyxdjz.com
地 址:全市各区均有网点 就近派车
技术服务:service@hyxdjz.com
商务洽谈:marketing@hyxdjz.com
简历投递:hr@hyxdjz.com




